#include <iostream>
using namespace std;
int main() {
int number;
// Input from user
cout << "Masukkan sebuah bilangan: ";
cin >> number;
// Check positive, negative, or zero
if (number > 0) {
cout << number << " adalah bilangan positif." << endl;
} else if (number < 0) {
cout << number << " adalah bilangan negatif." << endl;
} else {
cout << number << " adalah nol." << endl;
}
// Check odd or even
if (number % 2 == 0) {
cout << number << " adalah bilangan genap." << endl;
} else {
cout << number << " adalah bilangan ganjil." << endl;
}
return 0;
}
eraser.io syntax
KlasifikasiBilangan {
mulai[shape:oval]
masukkan bilangan[shape:parallelogram]
cek apakah bilangan GE 0 [shape:diamond]
cek apakah bilangan EQ 0 [shape:diamond]
cetak nol [shape:parallelogram]
cetak positif [shape:parallelogram]
cetak negatif [shape:parallelogram]
cek apakah bilangan mod 2 EQ 0 [shape:diamond]
cetak genap [shape:parallelogram]
cetak ganjil [shape:parallelogram]
selesai[shape:oval]
}
mulai>masukkan bilangan>cek apakah bilangan GE 0
cek apakah bilangan GE 0>cek apakah bilangan EQ 0:ya
cek apakah bilangan EQ 0>cetak nol:ya
cek apakah bilangan EQ 0>cetak positif:tidak
cek apakah bilangan GE 0>cetak negatif:tidak
cetak nol>cek apakah bilangan mod 2 EQ 0
cetak positif>cek apakah bilangan mod 2 EQ 0
cetak negatif>cek apakah bilangan mod 2 EQ 0
cek apakah bilangan mod 2 EQ 0>cetak genap:ya
cek apakah bilangan mod 2 EQ 0>cetak ganjil:tidak
cetak genap>selesai
cetak ganjil>selesai
Itu matahari(M): ذلك الشمس (dhālika ash-shams) Itu bulan(M): ذلك القمر (dhālika al-qamar) Itu langit(F): تلك السماء (tilka as-samā’) Itu bumi(F): تلك الأرض (tilka al-arḍ) Ini siang(M): هذا النهار (hādhā an-nahār) Ini malam(F): هذه الليلة (hādhihi al-layla)
digraph Flowchart {
rankdir=TB;
node [shape=box, style=rounded];
S [label="Mulai", shape=ellipse];
T [label="Studi Literatur"];
U [label="Pembuatan MFC"];
V [label="Pengujian MFC"];
W [label="Output sesuai ?", shape=diamond];
X [label="Identifikasi sistem MFC"];
Y [label="Pemilihan dan pengujian komponen"];
Z [label="Karakteristik komponen sesuai kebutuhan ?", shape=diamond];
A [label="A", shape=circle, width=0.2];
A1 [label="A", shape=circle, width=0.2];
C [label="Desain Rangkaian"];
D [label="Pengujian Simulasi dan Analisis Rangkaian"];
E [label="Output sesuai ?", shape=diamond];
F [label="Desain PCB"];
G [label="Simulasi dan Analisis PCB"];
H [label="Sistem bekerja ?", shape=diamond];
I [label="B", shape=circle, width=0.2];
I1 [label="B", shape=circle, width=0.2];
K [label="Mengevaluasi prototipe"];
L [label="Assembly dan Programming"];
M [label="Sistem bekerja ?", shape=diamond];
N [label="Optimasi Rangkaian"];
O [label="Assembly dan Programming"];
P [label="Pengujian sistem"];
Q [label="Mendekati prediksi ?", shape=diamond];
R [label="Dokumentasi dan Publikasi"];
TT [label="Selesai", shape=ellipse];
S -> T;
T -> U;
U -> V;
V -> W;
W -> T [label="Tidak"];
W -> X [label="Ya"];
X -> Y;
Y -> Z;
Z -> X [label="Tidak"];
Z -> A [label="Ya"];
A1 -> C;
C -> D;
D -> E;
E -> C [label="Tidak"];
E -> F [label="Ya"];
F -> G;
G -> H;
H -> F [label="Tidak"];
H -> I [label="Ya"];
I1 -> K;
K -> L;
L -> M;
M -> N [label="Tidak"];
N -> K;
M -> O [label="Ya"];
O -> P;
P -> Q;
Q -> K [label="Tidak"];
Q -> R [label="Ya"];
R -> TT;
}
PlantUML
@startuml
:(Mulai);
repeat :(Studi Literatur);
:(Pembuatan MFC);
:(Pengujian MFC);
repeat while (Output sesuai ?) is (Tidak)
->Ya;
:(Identifikasi sistem MFC);
repeat :(Pemilihan dan pengujian komponen);
repeat while (Karakteristik komponen sesuai kebutuhan ?) is (Tidak)
->Ya;
stop
start
repeat :(Desain Rangkaian);
:(Pengujian Simulasi dan Analisis Rangkaian);
repeat while (Output sesuai ?) is (Tidak)
->Ya;
repeat :(Desain PCB);
:(Simulasi dan Analisis PCB);
repeat while (Sistem bekerja ?) is (Tidak)
->Ya;
stop
start
repeat :(Mengevaluasi prototipe);
:(Assembly dan Programming);
repeat while (Sistem bekerja ?) is (Tidak)
repeat :(Optimasi Rangkaian);
->Ya;
:(Pengujian sistem);
repeat while (Mendekati prediksi ?) is (Tidak)
->Ya;
:(Dokumentasi dan Publikasi);
:selesai;
@enduml
Mermaid:
flowchart TD
S(["Mulai"]) --> T("Studi Literatur")
T --> U("Pembuatan MFC")
U --> V(["Pengujian MFC"])
V --> W{"Output sesuai ?"}
W -- Tidak --> T
W -- Ya --> X("Identifikasi sistem MFC")
X --> Y("Pemilihan dan pengujian komponen")
Y --> Z{"Karakteristik komponen sesuai kebutuhan ?"}
Z -- Tidak --> X
Z -- Ya --> A((("A")))
B((("A"))) --> C("Desain Rangkaian")
C --> D("Pengujian Simulasi dan Analisis Rangkaian")
D --> E{"Output sesuai ?"}
E -- Tidak --> C
E -- Ya --> F("Desain PCB")
F --> G("Simulasi dan Analisis PCB")
G --> H{"Sistem bekerja ?"}
H -- Tidak --> F
H -- Ya --> I((("B")))
J((("B"))) --> K("Mengevaluasi prototipe")
K --> L("Assembly dan Programming")
L --> M{"Sistem bekerja ?"}
M -- Tidak --> N("Optimasi Rangkaian")
N --> K
M -- Ya --> O("Assembly dan Programming")
O --> P("Pengujian sistem")
P --> Q{"mendekati prediksi"}
Q -- Tidak --> K
Q -- Ya --> R("Dokumentasi dan Publikasi")
R --> TT(["Selesai"])
E --> n1["Untitled Node"]
Penjelasan Perubahan Harokat pada Kolom “Akhir Huruf”:
Bentuk Mufrad (tunggal):
Fi’il كَتَبَ pada bentuk tunggal tetap memiliki harokat fathah (َ) pada huruf terakhir (بَ) untuk dhamir laki-laki tunggal (هو) dan perempuan tunggal (هي).
Bentuk Jama’ (jamak):
Pada bentuk dhamir plural laki-laki (هم) terdapat harokat dhammah (ُ) pada huruf terakhir (بُ), sedangkan untuk jama’ perempuan (هنّ) berubah menjadi sukun (ْ) pada huruf terakhir (بْ).
Bentuk Muannats (perempuan):
Dalam dhamir أنتِ dan dhamir dual perempuan (أنتما serta هما), harokat akhir berubah menjadi sukun (ْ), sesuai pola fi’il madhi.
Bentuk Mutakallim (orang pertama):
Pada bentuk fi’il أنا dan نحن, huruf terakhir memiliki sukun (ْ) karena terpengaruh tambahan akhiran dhamir seperti تُ dan نا.
Kata Dasar كَتَبَ (Menulis) –Kata dasar Fi’il Mudhari: كْتُبُ (Sedang / Akan Menulis)
Id
En
Ket
Akhir
Kata
Pre
Fi’il
Subyek
Literasi
Saya
I
Laki-laki/Perempuan
بُ
كْتُبُ
أَ
أَكْتُبُ
أنا
anā aktubu
Kita
We
Lk/Pr
بُ
كْتُبُ
نَ
نَكْتُبُ
نحن
nahnu naktubu
Kamu (Laki-laki)
You
Laki-laki
بُ
كْتُبُ
تَ
تَكْتُبُ
أنت
anta taktubu
Kamu (Perempuan)
You
Perempuan
بِينَ
كْتُبُ
تَ
تَكْتُبِينَ
أنت
anti taktubīna
Kamu 2 Laki-laki
You
2 Laki-laki
بَانِ
كْتُبُ
تَ
تَكْتُبَانِ
أنتما
antumā taktubāni
Kamu 2 Perempuan
You
2 Perempuan
بَانِ
كْتُبُ
تَ
تَكْتُبَانِ
أنتما
antumā taktubāni
Kamu 1 Lk + 1 Pr
You
1 Lk + 1 Pr
بَانِ
كْتُبُ
تَ
تَكْتُبَانِ
أنتما
antumā taktubāni
Dia (Laki-laki)
He
Laki-laki
بُ
كْتُبُ
يَ
يَكْتُبُ
هو
huwa yaktubu
Dia (Perempuan)
She
Perempuan
بُ
كْتُبُ
تَ
تَكْتُبُ
هي
hiya taktubu
Mereka 2 Laki-laki
They
2 Laki-laki
بَانِ
كْتُبُ
يَ
يَكْتُبَانِ
هما
humā yaktubāni
Mereka 2 Perempuan
They
2 Perempuan
بَانِ
كْتُبُ
تَ
تَكْتُبَانِ
هما
humā taktubāni
Mereka 3+ Laki-laki
They
3+ Laki-laki
بُونَ
كْتُبُ
يَ
يَكْتُبُونَ
هم
hum yaktubūna
Mereka 3+ Perempuan
They
3+ Perempuan
بْنَ
كْتُبُ
يَ
يَكْتُبْنَ
هن
hunna yaktubna
Mereka Campuran
They
Campuran
بُونَ
كْتُبُ
يَ
يَكْتُبُونَ
هم
hum yaktubūna
Penjelasan Struktur Fi’il Mudhari:
Fi’il Mudhari digunakan untuk menunjukkan perbuatan yang sedang berlangsung atau akan dilakukan.
Pola fi’il mudhari diawali dengan huruf mudhari’ (أ, ن, ت, ي), kemudian pola kata kerja dasar ditambahkan akhiran sesuai dhamir.
Akhir Huruf:
Dhammah (ُ) untuk bentuk tunggal (contoh: أَكْتُبُ).
Kasrah (ِينَ) untuk bentuk tunggal perempuan.
Alif + Nun (بَانِ) untuk bentuk dual (contoh: تَكْتُبَانِ).
Wawu + Nun (بُونَ) untuk bentuk jama’ laki-laki.
Nun sukun (بْنَ) untuk bentuk jama’ perempuan.
Contoh Penggunaan:
أَكْتُبُ (Saya menulis) → Untuk saya (laki-laki/perempuan).
تَكْتُبِينَ (Kamu menulis) → Untuk satu perempuan.
يَكْتُبُونَ (Mereka menulis) → Untuk banyak laki-laki.
نَكْتُبُ (Kami menulis) → Untuk kita bersama.
Kata Dasar كَتَبَ (Menulis) – Kata dasar Fi’il ‘Amr: اُكْتُ (Tulislah!)
Id
En
Ket
Akhiran
Akhir Huruf
Fi’il
Literasi
Kamu (Laki-laki)
You
Laki-laki
–
بْ
اُكْتُبْ
uktub
Kamu (Perempuan)
You
Perempuan
ي
بِي
اُكْتُبِي
uktubī
Kamu 2 Laki-laki
You
2 Laki-laki
ا
بَا
اُكْتُبَا
uktubā
Kamu 2 Perempuan
You
2 Perempuan
ا
بَا
اُكْتُبَا
uktubā
Kamu 1 Lk + 1 Pr
You
1 Lk + 1 Pr
ا
بَا
اُكْتُبَا
uktubā
Kalian (Laki-laki)
You
3+ Laki-laki
وا
بُوا
اُكْتُبُوا
uktubū
Kalian (Perempuan)
You
3+ Perempuan
نَ
بْنَ
اُكْتُبْنَ
uktubna
Penjelasan Struktur Fi’il Amr:
Fi’il Amr digunakan untuk memberikan perintah atau instruksi.
Pola fi’il amr dimulai dari bentuk asal mudhari’ (present tense), kemudian dibuang huruf mudhari’ (أ, ت, ي, ن) di awal dan menambahkan harokat perintah seperti dhammah (ُ) pada awal kata, tergantung pada dhamir.
Perubahan Akhir Huruf:
Sukun (ْ) pada dhamir tunggal laki-laki (contoh: اُكْتُبْ).
Kasrah + Ya (بِي) pada dhamir tunggal perempuan.
Alif (بَا) untuk dhamir ganda (dual).
Wawu (بُوا) untuk dhamir plural laki-laki.
Nun sukun (بْنَ) untuk dhamir plural perempuan.
Contoh Penggunaan:
اُكْتُبْ (Tulis!) → Perintah untuk satu orang laki-laki.
اُكْتُبِي (Tulis!) → Perintah untuk satu orang perempuan.
اُكْتُبُوا (Tulis!) → Perintah untuk banyak orang laki-laki.
اُكْتُبْنَ (Tulis!) → Perintah untuk banyak orang perempuan.
Fi’il pelaku (lazim) dan fi’il objek (muta’addi) menggunakan kata dasar دَخَلَ (masuk):
1. Fi’il Pelaku (Fi’il Lazim)
Kata dasar دَخَلَ (masuk) termasuk fi’il lazim dalam penggunaan dasarnya, karena hanya memerlukan pelaku (fa’il) tanpa memerlukan objek untuk melengkapi maknanya.
Contoh Penggunaan Fi’il Lazim:
دَخَلَ الطَّالِبُ. (Siswa itu masuk.)
Fi’il: دَخَلَ (masuk)
Pelaku (Fa’il): الطَّالِبُ (siswa)
2. Fi’il Objek (Fi’il Muta’addi)
Meskipun kata dasar دَخَلَ secara alami lazim, dalam konteks tertentu bisa menjadi muta’addi, yaitu ketika melibatkan objek (maf’ul bih) untuk menunjukkan ke mana seseorang masuk. Dengan demikian, objek dalam konteks ini sering berupa tempat atau tujuan masuknya.
Contoh Penggunaan Fi’il Muta’addi:
دَخَلَ الطَّالِبُ الفَصْلَ. (Siswa itu masuk ke kelas.)
Fi’il: دَخَلَ (masuk)
Pelaku (Fa’il): الطَّالِبُ (siswa)
Objek (Maf’ul Bih): الفَصْلَ (kelas)
Tabel Fi’il Lazim dan Muta’addi untuk Kata Dasar دَخَلَ (Lampau)
Kategori
Fi’il
Pelaku (Fa’il)
Objek (Maf’ul Bih)
Contoh Kalimat
Literasi
Fi’il Lazim
دَخَلَ
الطَّالِبُ
–
دَخَلَ الطَّالِبُ
Dakhala aṭ-ṭālibu (Siswa masuk)
Fi’il Muta’addi
دَخَلَ
الطَّالِبُ
الفَصْلَ
دَخَلَ الطَّالِبُ الفَصْلَ
Dakhala aṭ-ṭālibu al-faṣla
Ciri-Ciri Kata Dasar Masuk (دَخَلَ):
Sebagai Fi’il Lazim:
Tidak membutuhkan objek.
Contoh kalimat: دَخَلَ الطَّالِبُ. (Siswa masuk.)
Sebagai Fi’il Muta’addi:
Memerlukan objek (biasanya berupa tempat).
Contoh kalimat: دَخَلَ الطَّالِبُ المَسْجِدَ. (Siswa masuk masjid.)
Variasi Bentuk Fi’il (Mudhari dan Amr)
Jenis Fi’il
Kata Dasar
Bentuk
Contoh Kalimat
Literasi
Fi’il Mudhari
دَخَلَ
يَدْخُلُ
يَدْخُلُ الطَّالِبُ الفَصْلَ
Yadkhulu aṭ-ṭālibu al-faṣla
Fi’il Amr
دَخَلَ
اُدْخُلْ
اُدْخُلِ المَسْجِدَ
Udkhul al-masjida
Fi’il mabni lil-majhul (pasif) dari kata dasar دَخَلَ (masuk):
1. Fi’il Madhi (Lampau) dalam Bentuk Pasif
Dalam bentuk pasif, دَخَلَ berubah menjadi دُخِلَ untuk menunjukkan bahwa sesuatu telah dimasuki.
Dalam bahasa Arab, “yawma” dan “yawmu” merupakan variasi dari kata “yawm,” yang berarti “hari.” Perbedaan di antara keduanya terletak pada penggunaan tata bahasanya:
Yawma (يَوْمَ) digunakan dalam kasus akusatif, yang sering kali menunjukkan objek kata kerja atau preposisi.
Yawmu (يَوْمُ) digunakan dalam kasus nominatif, yang biasanya menunjukkan subjek kalimat.
Misalnya:
Yawma al-Din (يَوْمَ الْقِيَامَةِ) berarti “Hari kiamat” dalam kasus akusatif atau menunjukkan objek. Contoh: (يَصْلَوْنَهَا يَوْمَ ٱلدِّينِ) Masuk ke dalam (nya) (di) Hari kiamat. Yawmu al-Din (يَوْمُ الدِّينِ) berarti “Hari Kiamat” dalam bentuk nominatif atau menunjukkan subjek. Contoh: (مَا يَوْمُ ٱلدِّينِ) Apakah (yang dimaksud dengan) Hari kiamat
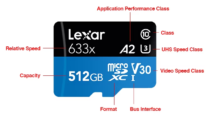
Perbedaan antara format kartu microSD sangat signifikan:
microSD: memiliki kapasitas hingga 2GB dan berfungsi di slot microSD apa pun.
microSDHC: memiliki kapasitas lebih dari 2GB dan hingga 32GB dan berfungsi di perangkat keras yang mendukung SDHC dan SDXC.
microSDXC: memiliki kapasitas lebih dari 32GB dan hingga 2TB dan hanya didukung di perangkat yang kompatibel dengan SDXC.
microSDUC: mendukung kartu hingga 128TB dan akan membutuhkan perangkat yang kompatibel.
Perbedaan antara microSD dan SDXC (dan juga kartu SDHC!) terletak pada kemampuan kartu untuk mentransfer data dengan cepat.
Format SDHC dan SDXC dapat mendukung antarmuka bus Ultra High Speed (UHS)—sirkuit lebih cepat yang memungkinkan data bergerak lebih cepat. Tiga versi UHS adalah UHS-I (dengan kecepatan bus hingga 104MBps), UHS-II (hingga 312MBps), dan UHS-III (hingga 624MBps).
Kelas Kecepatan
Kelas Kecepatan menunjukkan kecepatan tulis minimum kartu memori dalam megabita per detik. Ada empat Kelas Kecepatan yang dapat dipilih:
Kelas 2: minimal 2MBps.
Kelas 4: minimal 4MBps.
Kelas 6: setidaknya 6MBps.
Kelas 10: setidaknya 10MBps.
Kelas Kecepatan UHS
Kelas Kecepatan UHS menunjukkan kecepatan tulis minimum untuk kartu microSD yang mendukung kecepatan bus UHS-I, II, dan III.
U1: kecepatan tulis minimal 10MBps.
U3: kecepatan tulis minimal 30MBps.
Kelas Kinerja Aplikasi
Kelas Kinerja Aplikasi menetapkan kecepatan tulis berkelanjutan minimum 10MBps, bersama dengan kecepatan baca dan tulis acak minimum yang diukur dalam operasi input dan output per detik (IOPS).
Ada dua kelas:
A1: kecepatan baca acak minimum 1500IOPS; kecepatan tulis acak 500IOPS.
A2: kecepatan baca acak minimum 4000IOPS; kecepatan tulis acak 200IOPS.
Kelas Kecepatan Video
Kelas Kecepatan Video menetapkan kecepatan tulis sekuensial minimum, yang penting saat merekam video. Semakin tinggi resolusi video, semakin cepat kecepatan yang dibutuhkan. Ada lima kelas untuk video:
V6: kecepatan tulis minimum 6MBps.
V10: kecepatan tulis minimum 10MBps.
V30: kecepatan tulis minimum 30MBps.
V60: kecepatan tulis minimum 60MBps.
V90: kecepatan tulis minimum 90MBps.
SD Card Association merekomendasikan UHS Speed Class 3 (U3) atau lebih tinggi untuk merekam video 4K, dan V60 atau lebih tinggi untuk video 8K. Untuk video full HD, disarankan menggunakan UHS Speed Class 1 (U1) atau kartu microSD Speed Class 10 (10) atau yang lebih tinggi. Jika kecepatan tulis kartu terlalu lambat, video hasil rekaman tersendat-sendat.